

Условия соревнований
Соревнования проходили по двум номинациям «Дефиле» и ГЛОНАСС.
Условием номинации «Дефиле» было прохождение роботом П-образного коридора, обозначенного черной краской на белом поле. Побеждала та команда, чей робот проходил испытание за меньшее время и совершал наименьшее число ошибок.
Условием соревнований ГЛОНАСС было прохождение М-образной трассы с маркерами, расположенными по углам буквы. Результат засчитывался лишь в том случае, если маркеры проходились роботом в определенной последовательности в зоне трехметрового радиуса и не более.
Робот «Муравей»
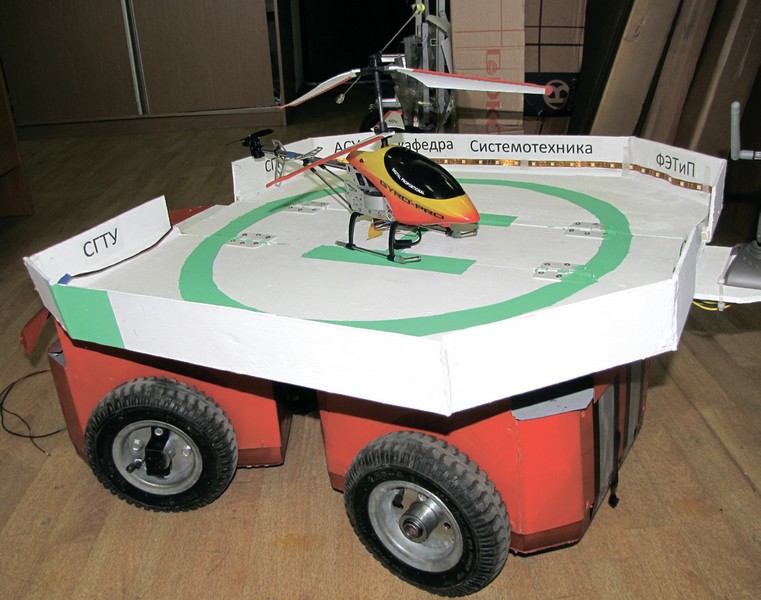
Мобильный робот «Муравей» представляет собой тележку высокой проходимости. Движение робота обеспечивают два электродвигателя, в качестве которых используются электродвигатели стеклоподъемника от автомобиля ВАЗ-2112.
В системе управления роботом использовались: дискретный датчик контраста, ультразвуковой и инфракрасный датчики, которые функционально дополняют друг друга. Датчик контраста обнаруживает переход черного к белому цвету, тем самым точно определяя положение мобильного робота относительно ограничивающей трассу линии.
Сигналы от двух инфракрасных датчиков, двух датчиков линии и двух ультразвуковых датчиков поступают на контроллер, обрабатываются программой, созданной в среде CoDeSys V2.3. Команды управления передаются на модуль дискретного вывода МУ110-8Р, и после этого происходит переключение реле, управляющего подачей напряжения на электродвигатель. Таким образом, под контролем датчиков изменяется траектория движения мобильного робота. Для электропитания двигателей и питания ПЛК установлено по два аккумулятора (12 В), соединенных параллельно.
В номинации ГЛОНАСС управление роботом осуществлялось с помощью модуля “ГеоС-1М” (КБ «ГеоСтар навигация»). Модуль был подключен к контроллеру ПЛК100 через интерфейс RS-232 и передавал координаты по бинарному протоколу.
Преимущества ПЛК
Поначалу казалось, что решения других участников, реализованные на специализированных компонентах (AVR, PIC, платы National Instruments), дают им несомненное преимущество в эффективности, быстродействии и в удобстве используемых интерфейсов передачи данных. Однако, как оказалось впоследствии, дело не только в этих очевидных фактах. В дальнейшем предполагаемые недостатки ПЛК оказались преимуществами и контроллеру ОВЕН не было равных. Чипы конкурентов испытывали серьезные проблемы с охлаждением (все участники использовали воздушное охлаждение), у ПЛК не возникало подобных проблем. Кроме того, специализированные платы оказались крайне чувствительными к вибрации и статическому заряду, накапливающемуся в процессе работы, а контроллеру ОВЕН все помехи были нипочем.
Большую роль сыграла «неприхотливость» ПЛК – работать приходилось в спартанских условиях, в палатках, без нормально приспособленной мастерской. Высокая надежность контроллера позволяла не беспокоиться за поломки при хранении, переноске и монтаже, в то время как устройства других команд, поставляемые без защитного корпуса, нуждались в куда более внимательном обращении.
Пожалуй, единственным серьезным недостатком ПЛК стала невозможность быстрой (в условиях соревнований) отладки управляющей программы. Финальная отладка проводилась непосредственно на поле, и возможность быстро скорректировать параметр была очень важна. Нашей команде всякий раз приходилось перекомпилировать программу, что занимало значительное время.
Однако и конкурентам пришлось потратить много времени на программные настройки синхронизации скоростей оборотов вала электродвигателей, которые оказались сложными и ненадежными. Наша команда сделала настройки аппаратно с помощью переменных резисторов. Такое решение оказалось куда более эффективным.
Для экстремальных ситуаций
На III Всероссийском робототехническом фестивале в 2011 году робот «Муравей» был представлен в качестве базы для мобильного комплекса с радиоуправляемым вертолетом с системой технического зрения. Такой комплекс на базе ПЛК100 может использоваться для поиска выживших в экстремальных ситуациях. Разработчики мобильного комплекса заняли первое место в номинации «Фристайл», и два участника команды были приглашены в Париж на конференцию по робототехнике, где они сделали доклад о своих разработках.
В начале 2012 года робот «Муравей» стал испытательной базой для изучения возможностей лазерного сканера SICK 511 при создании беспилотных мобильных систем. Опыт, полученный при разработке «Муравья», пригодится студентам при создании третьей версии беспилотного автомобиля «Газель» для участия в соревнованиях «Робокросс-2012».
От редакции Пока статья готовилась к печати, команда студентов Team Minds Finders приняла участие в студенческом конкурсе Microsoft Imagine CUP Software в Саратове. Мобильные роботы под управлением автоматики ОВЕН использовались для обезвреживания минных полей. 19 марта 2012 года студенты СГТУ стали победителями конкурса. Поздравляем всех участников с победой!
Контактный телефон: (8452) 221 042 и адрес: iac_sstu@mail.ru