


Лабораторный стенд
Лабораторная установка состоит из пневмоманипулятора, системы управления и узла подготовки воздуха (фото 1). Манипулятор – это две руки, расположенные в одной плоскости, с пятью степенями свободы, что позволяет осуществлять: выдвижение-втягивание, подъемопускание, поворот рук, замыкание и размыкание захватов. Движения звеньев манипулятора осуществляются за счёт энергии сжатого воздуха, который подается в пневмоцилиндры через электропневматические клапаны с дросселями.
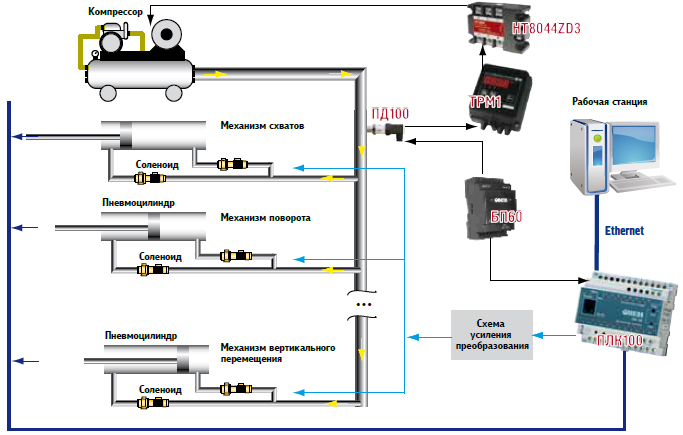
Начальные и конечные положения звеньев фиксируются электромагнитными контактами, которые, замыкаясь, передают электрический сигнал о выполненном движении системе управления. Для снижения динамических нагрузок при подходе звена манипулятора к концевому упору установлены гидравлические демпферы. Характеристики робота МП-11 приведены в таблице. Функциональная схема системы управления роботом МП-11 представлена на рис. 1.
Аппаратную часть системы составляют:
- контроллер ОВЕН ПЛК100;
- одноканальный регулятор ОВЕН ТРМ1;
- схема усиления управляющих сигналов;
- датчик давления ОВЕН ПД100;
- блок питания ОВЕН БП60Б;
- твердотельное реле;
- электропневматические клапаны, датчики положения;
- компьютер.
Система работает следующим образом. ПЛК формирует управляющие сигналы движения звеньев манипулятора согласно программе. Сигналы усиливаются и подаются на электропневматические клапаны. Сжатый воздух приводит в движение манипулятор. При достижении конечного положения срабатывает электромагнитный контакт и передаёт сигнал о выполненном движении.
Для поддержания давления воздуха в пневмосистеме манипулятора в диапазоне 0,3...0,5 МПа используется локальная система управления. Датчик ПД100 измеряет текущее значение давления в пневмосистеме и передаёт сигналы двухпозиционному регулятору ТРМ1, который управляет включением/отключением компрессора с трехфазным двигателем через твердотельное реле, тем самым поддерживая давление воздуха в пневмосистеме в указанных пределах.
На новом стенде студенты выполняют несколько лабораторных работ. В одной работе студенты осваивают принцип построения циклограммы движения звеньев манипулятора и её реализации в программном виде. Для этого на компьютере пишется программа в среде CoDeSys на языке SFC. После успешно выполненной отладки программа записывается в память ПЛК100 и воспроизводится в автоматическом режиме. Под управлением программы робот-манипулятор перемещает детали цилиндрической формы из наклонного механического буфера в приёмное устройство.
В другой лабораторной работе студенты знакомятся с принципом двухпозиционного регулирования давления в пневмосистеме, рассматривают функциональную и структурную схемы системы управления с обратной отрицательной связью и производят выбор элементной базы для её реализации по каталогам ОВЕН.
При выполнении курса лабораторных работ студенты получают навыки:
- работы с промышленной сетью Ethernet и современными контроллерами;
- подготовки программ на языке SFC в среде CoDeSys;
- освоения принципа циклового программного управления.
Полученные навыки позволят студенту в будущем не только правильно подбирать компоненты автоматизации систем управления для робототехнических объектов, но и разрабатывать алгоритмы управления, создавать программы для обслуживания станков, прессов, литейных машин и др. современного оборудования. Получаемые знания применимы повсеместно, где используются манипуляционные роботы, выполняющие перемещение заготовок, транспортировку в отведённое место и т.п.
|
Характеристики |
Значение |
|
Грузоподъёмность, кг |
1 |
|
Масса заготовки, переносимая одной рукой , кг |
0,5 |
|
Количество степеней подвижности |
5 |
|
Число точек позиционирования по каждой степени подвижности |
2 |
|
Погрешность позиционирования |
± 0,05 |
|
Разворот рук, град |
20..100 |
|
Перемещение рук: горизонтальное, мм вертикальное, мм сдвиг захвата, мм поворот, град |
0..200 0..65 25 0..200
|
|
Тип привода |
пневматический |
|
Давление воздуха, МПа |
0,3...0,5 |
|
Тип системы управления |
цикловой |
|
Масса манипулятора, кг |
72 |